Pan Tilt Roll Rotation Matrix
3d Rotations Part 1
Retrieve Yaw Pitch Roll From Rvec Opencv Q A Forum
Https Www Cs Cornell Edu Courses Cs4620 2015fa Lectures 11transforms3dweb Pdf

Base

A Head Pose Euler Rotation Angles Note That The Z Axis Indicates The Download Scientific Diagram

A General Three Link Pan Tilt Roll Camera Positioner Download Scientific Diagram
This allows the camera to point left right and in between.
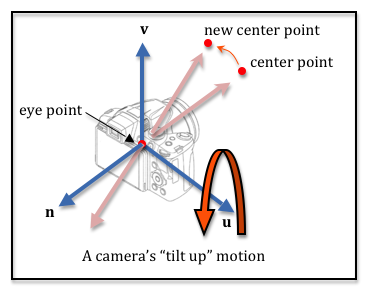
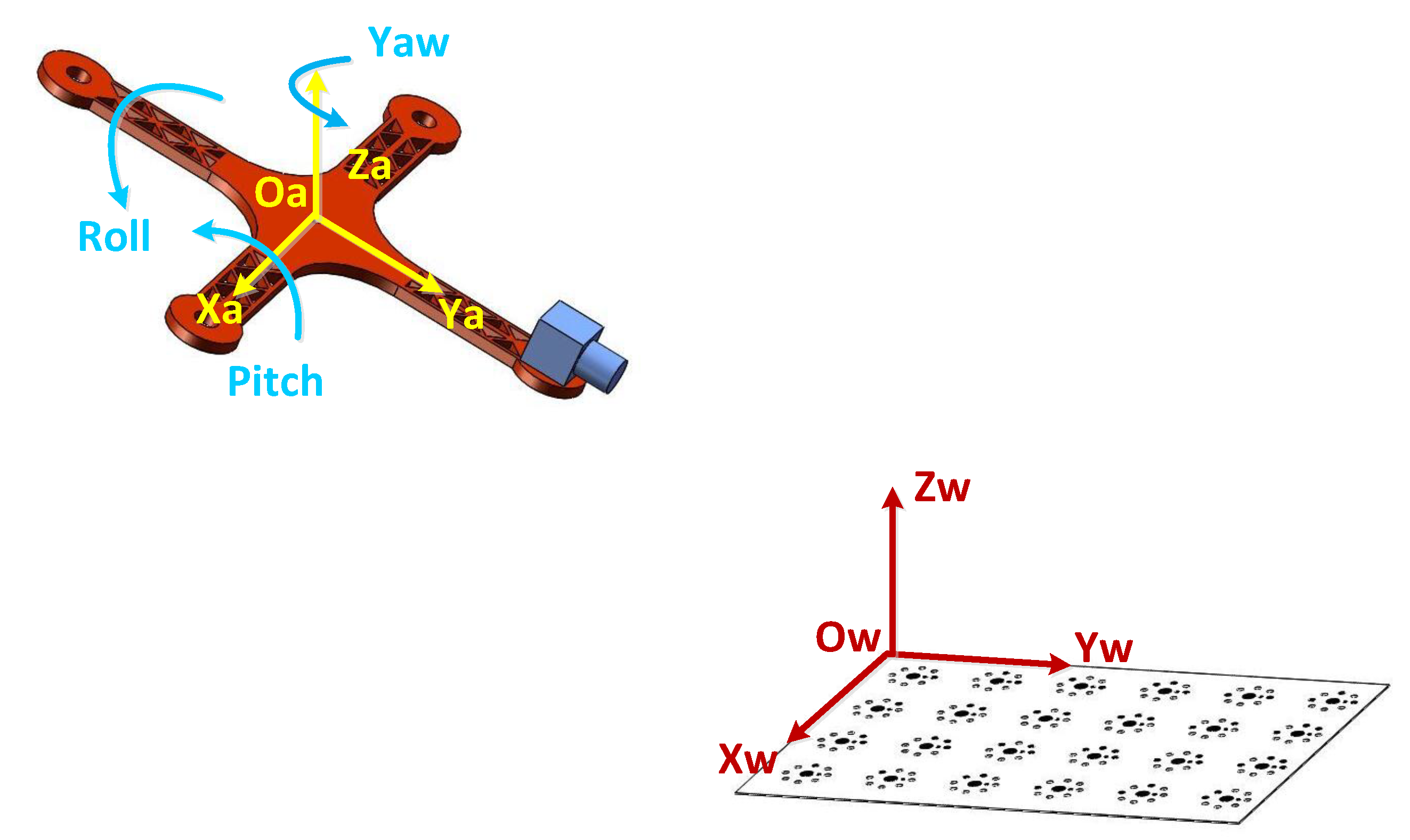
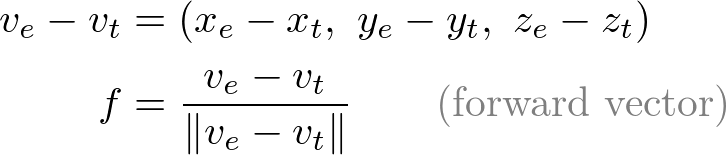
Pan tilt roll rotation matrix. Given a 3 3 rotation matrix. If i cross the up vector from my rotation matrix with the forward vector calculated from the camera current pan tilt i will get the side vector which i can use to calculate the roll angle. Angles are given in degrees 0 to 360 and counted counter clockwise. X r y r image coordinates after roll movement.
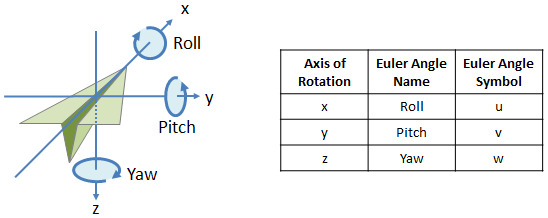
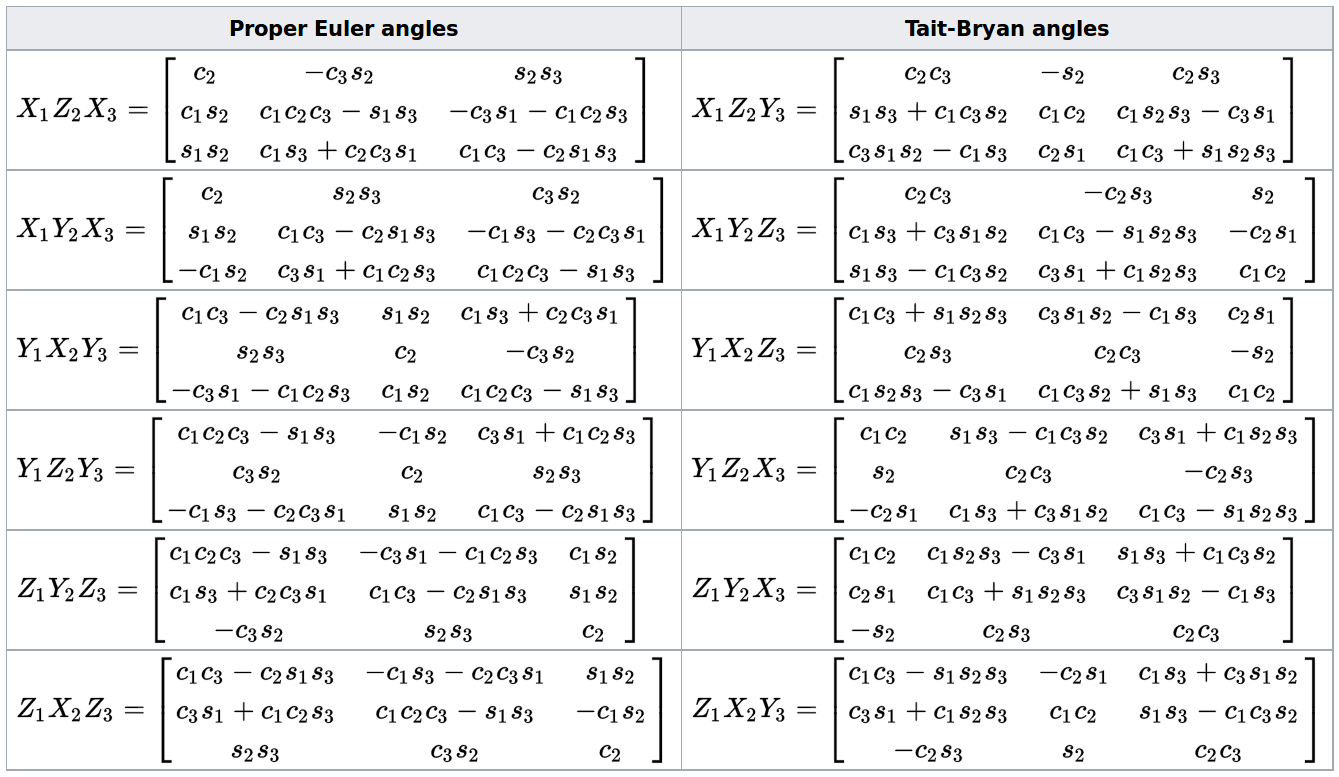
An entity can be rotated by changing these values. Given 3 euler angles the rotation matrix is calculated as follows. Thus the third row and third column of look like part of the identity matrix while the upper right portion of looks like the 2d rotation matrix. The 3 euler angles are.
Double roll math atan side z math sqrt side x side x side y side y. Here atan2 is the same arc tangent function with quadrant checking you typically find in c or matlab. In 2d a rotation just has an angle in 3d specifying a rotation is more complex basic rotation about origin. In this report instead of a single focal length and the aspect ratio another equivalent representation of two focal lengths f x and f y is used.
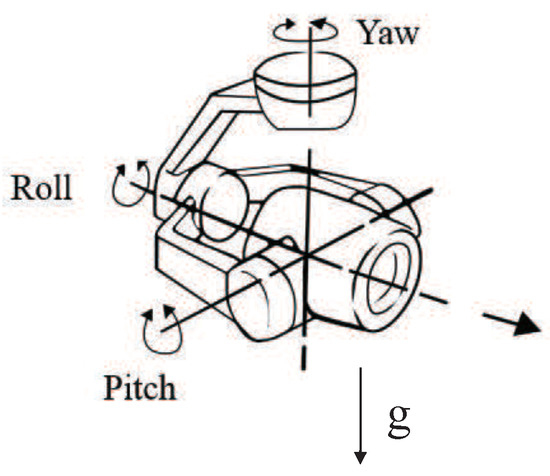
Note on angle ranges. Positive rotation is ccw when vector is pointing at you many ways to specify rotation indirectly through frame transformations directly through euler angles. A pan yaw movement indicates rotation about the top axis. Pan is the angle of rotation around z from north left right corresponds to azimuth.
If the camera rotates by a rotation matrix r and. T x ty z translation matrix. Unit vector axis and angle convention. Each rotation matrix is a simple extension of the 2d rotation matrix for example the yaw matrix essentially performs a 2d rotation with respect to the and coordinates while leaving the coordinate unchanged.
Spatial rotations in three dimensions can be parametrized using both euler angles and unit quaternions this article explains how to convert between the two representations. Entity pan can also serve as angle vector. Actually this simple use of quaternions was first presented by euler some seventy years earlier than hamilton to solve the problem of magic squares for this reason the dynamics community commonly refers to quaternions in. Decomposing a rotation matrix.
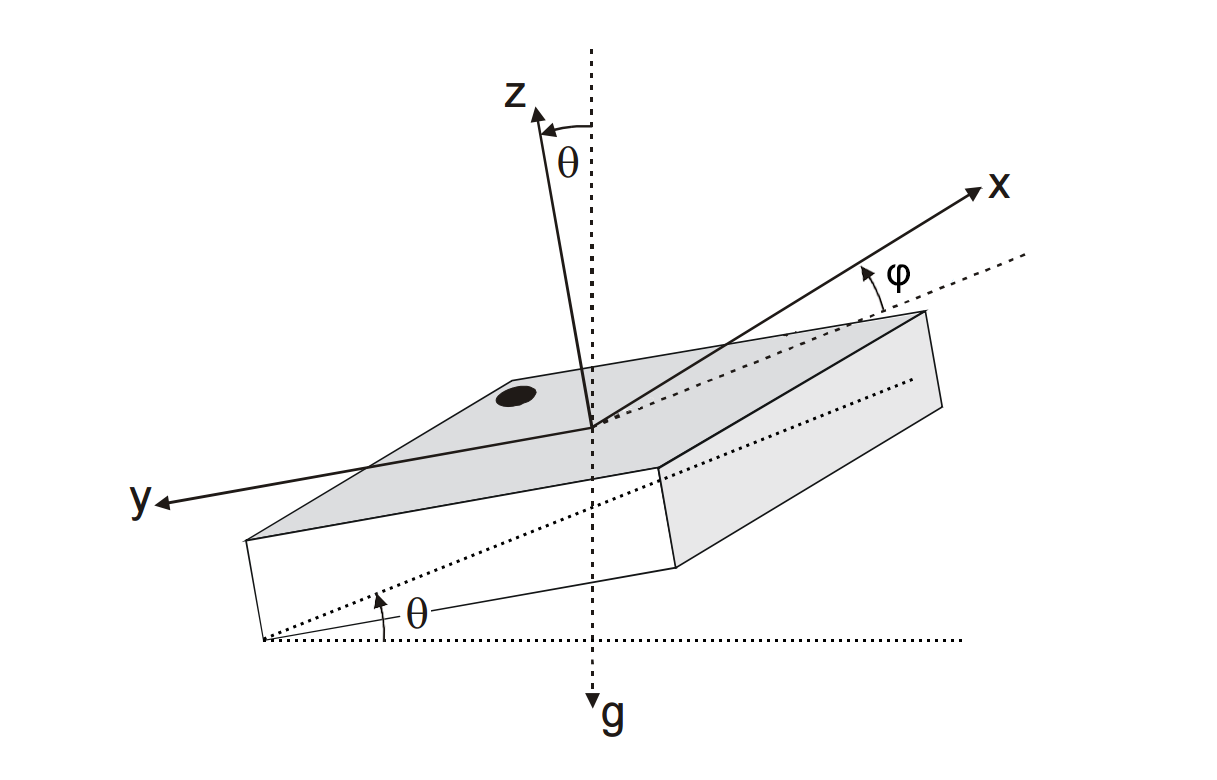
0 pan 360 tilt is the angle of rotation around x from down down up corresponds to zenith. 0 tilt 180 roll is the angle of rotation around y clockwise side to side depends on horizon line 0 roll 360. Composing a rotation matrix. The range of the tilt movement is very important as it controls your ability to capture shots above or below the drone.
Use the yaw pitch and roll values to generate a rotation matrix equation 9 use the rotation matrix to rotate all the points that make up the aircraft equation 6a 6b and 6c now the aircraft is rotated where we want it so far so good.

Tilt Roll And Pan Explained Uav Falcon
7 5 Rotating A Camera Learnwebgl

Quadrotor With A Pan Tilt Roll Camera Positioner Download Scientific Diagram

A 3 Link Camera Positioner Configurable For Tilt Pan Roll Operating Download Scientific Diagram
Https Www Cis Upenn Edu Cis580 Spring2015 Lectures Cis580 02 Camera Geometry Pdf
Http Www Cs Cornell Edu Courses Cs4620 2012fa Lectures 05transformrotations Pdf

Cool Emerald Rotations In 3d Space Using Euler Angles
Http Www Cs Cornell Edu Courses Cs4620 2017sp Slides 09transformations Pdf
Pdf Control Of Pan Tilt Mechanism Angle Using Position Matrix Method
Sensors Free Full Text Measurement Of Unmanned Aerial Vehicle Attitude Angles Based On A Single Captured Image Html
Opengl Camera
Http Lup Lub Lu Se Student Papers Record 8982019 File 8982023 Pdf

Pdf Camera Pan And Tilt Estimation In Soccer Scenes Based On Vanishing Points
Https Link Springer Com Content Pdf 10 1007 S10846 017 0522 9 Pdf

Pdf Method For Pan Tilt Camera Calibration Using Single Control Point

Gimbal Orientation Study And Assessment For The Autonomous Underwater Vehicles Sciencedirect
How To Use A Three Axis Accelerometer For Tilt Sensing Dfrobot

Camera Matrix Matlab
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcsh0rgabba6p6fjcsq 5bztobiljeua5buo6l2t1ft3mh9s2o9z Usqp Cau
Sensors Free Full Text Obtaining World Coordinate Information Of Uav In Gnss Denied Environments Html
Aw A Wireless Base Station User Manual Manual Xsens Technologies

New Coordinates By 3d Rotation Of Points Calculator High Accuracy Calculation
Https Openaccess Thecvf Com Content Wacv 2020 Papers Zhang Deepptz Deep Self Calibration For Ptz Cameras Wacv 2020 Paper Pdf
Https Www Mdpi Com 2076 3417 10 15 5064 Pdf
Https Ieeexplore Ieee Org Iel7 8345804 8354104 08354326 Pdf
Http Arxiv Org Pdf 1904 08743
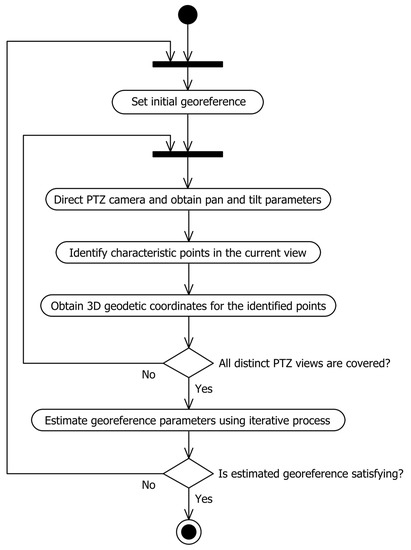
Ijgi Free Full Text A Method For Estimating Surveillance Video Georeferences Html

A Review Of Spherical Motion Generation Using Either Spherical Parallel Manipulators Or Spherical Motors Sciencedirect

Design And Analysis Of Ground Based Operation Test Bench For Complex Optical Machine Functional Components Aip Advances Vol 9 No 9

Gyro Stabilization Of A Positioning Unit

Pdf A Miniature Pan Tilt Actuator The Spherical Pointing Motor
Pdf Recognizing Human Visual Focus Of Attention From Head Pose In Meetings

Tomlov Wifi Ptz Outdoor Security Camera 1080p Hd 5x Digital Zoom Pan Tilt Two Way Audio Motion Detection Full Color Night Vision Wireless Surveillance Outside Ip Cameras For Before And After The House

Amazon Com Monoprice 5mp Bullet Hd Tvi Security Camera Motorized Varifocal 2 8 12mm 4 In 1 Tvi Cvi Ahd Cvbs Matrix Ir 2 0 131ft Range Ip67 Camera Photo

Pdf Full Dof Calibration Of A Rotating 2 D Lidar With A Simple Plane Measurement
Http Folk Ntnu No Torarnj Amc2018 Pdf
Https Link Springer Com Content Pdf 10 1007 2fs10846 020 01147 7 Pdf

Free Camera
Https Etd Ohiolink Edu Etd Send File Accession Ucin1470672220 Disposition Attachment

Pdf A Nonlinear Camera Gimbal Visual Servoing Using Command Filtered Backstepping
Pdf Imu Application In Measurement Of Vehicle Position And Orientation For Controlling A Pan Tilt Mechanism

